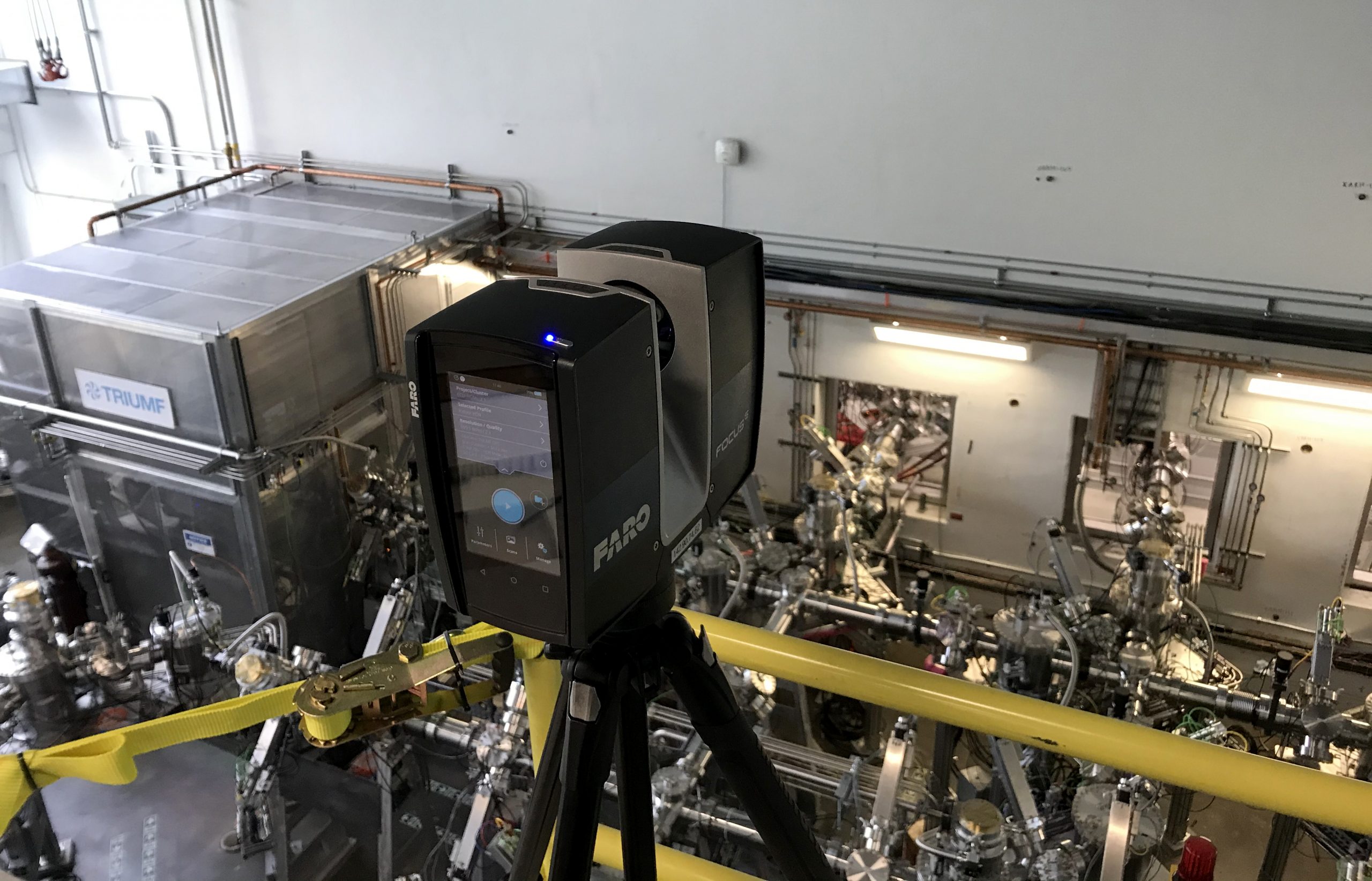
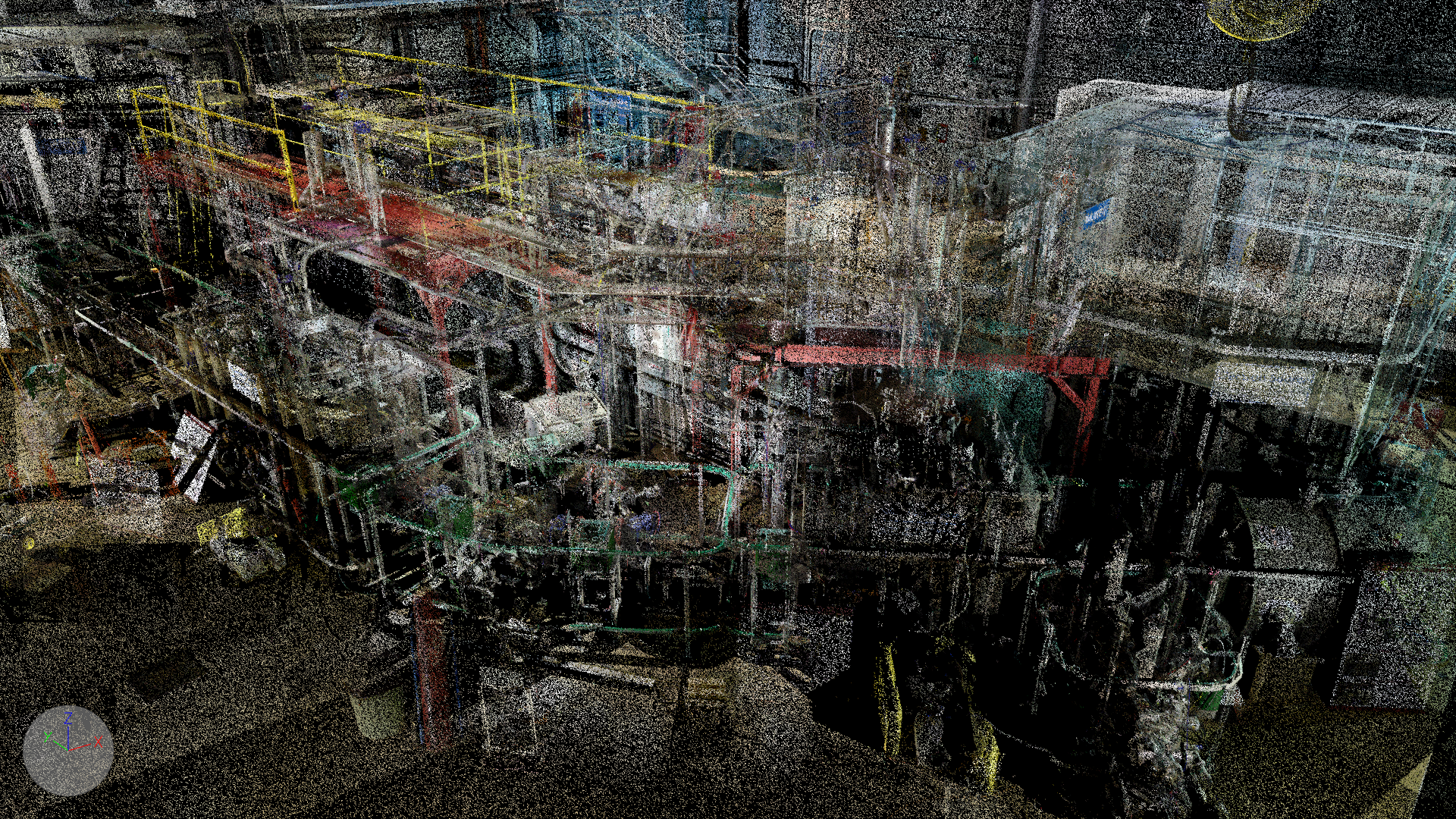
Light Detection and Ranging (LiDAR) devices use lasers to detect the shapes and distances of objects in their surroundings based on how they reflect light. Although LiDAR technology is most widely known for its use in the development of autonomous cars or for architectural measurements, TRIUMF Beamlines Group has deployed this technology due to +-1mm dimensional measurement accuracy, to capture as-built references to the lab’s extensive science and technology infrastructure and more.
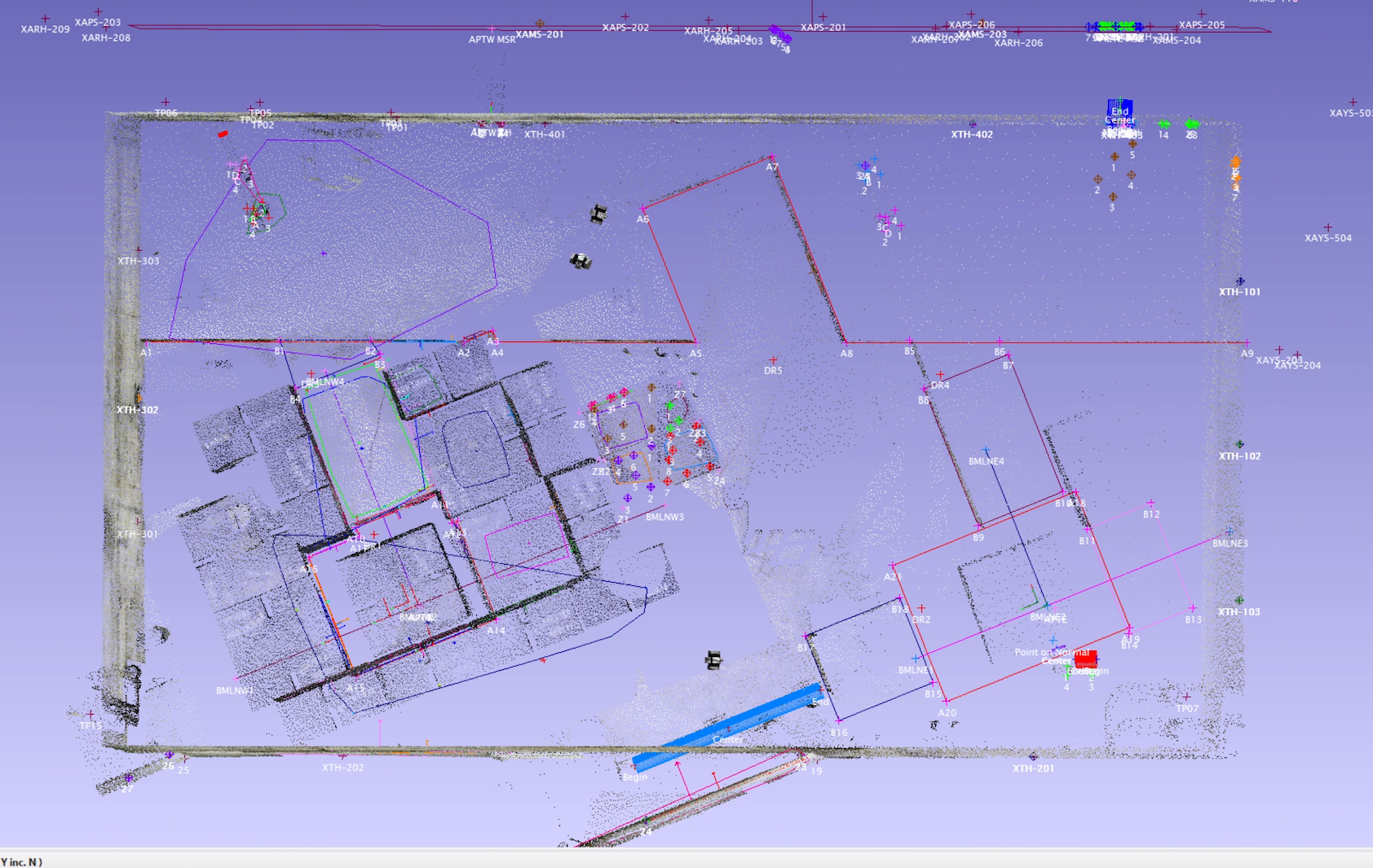
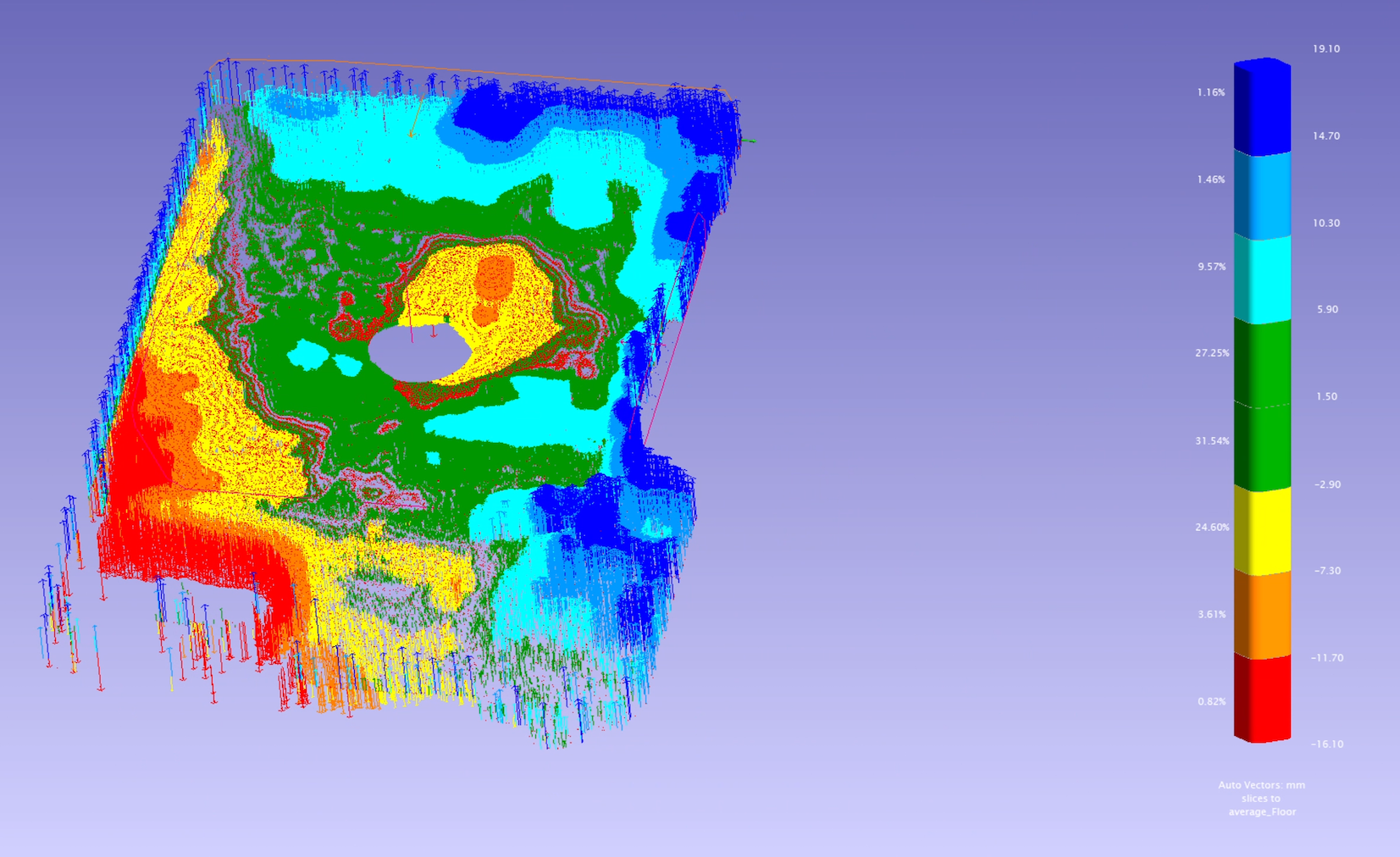
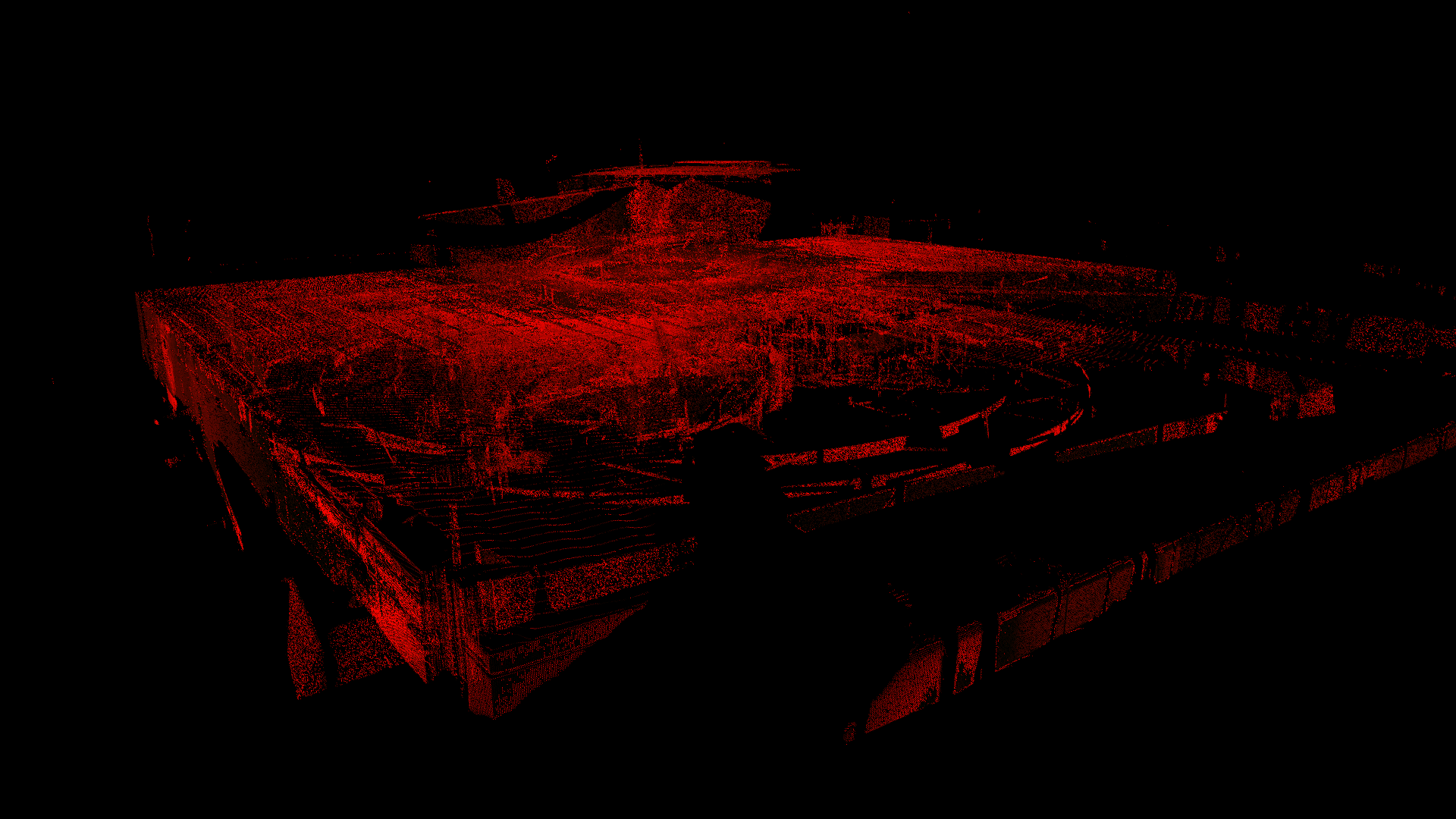
In the scan data shown here, LIDAR can be overlaid on alignment grids to determine if elements are placed correctly. Used to measure shielding blocks that have a very rough surface and can not be measured with laser tracker targets. Peering into the large cyclotron vault to take measurements while it’s actually running and completely inaccessible for approximately nine months of the year. As well as to detect a +-20mm variation in slope of concrete for levelling critical operational equipment.
Recently, TRIUMF’s communication team, with the support of external partners, dug into hundreds gigabytes of the existing scan data to explore how this technology could be used to enhance public access to the site, particularly with respect to virtualizing access to previously inaccessible areas.
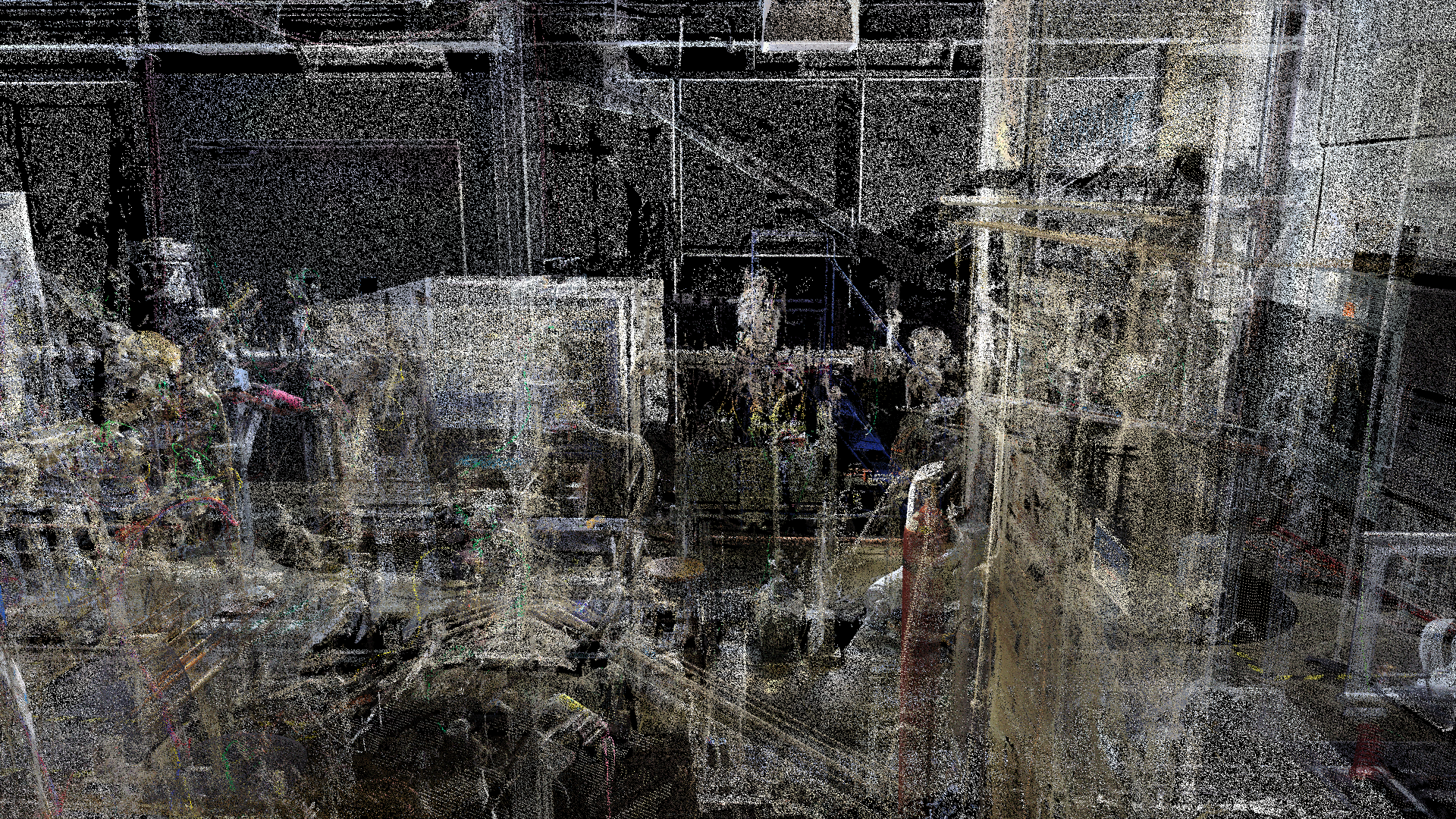
LiDAR data can be accessed as three-dimensional ‘point clouds’ that represent scanned spaces in various fidelities. To transform this data into more recognizable formats, like video, we had to first identify what the native software provided, and what additional tools were needed to manipulate the data to create unique virtual views of each space.
This early R&D process helped establish the software toolchain and overall production pipeline. The selected process involved employing architectural and animation software tools to author each scene independently, with camera movements and lighting designs manipulated in order to mimic live action interactions inside these virtual spaces.
TRIUMF’s Beamlines Group Uses a FARO LiDAR camera to capture as-built designs of the lab’s complex science infrastructure
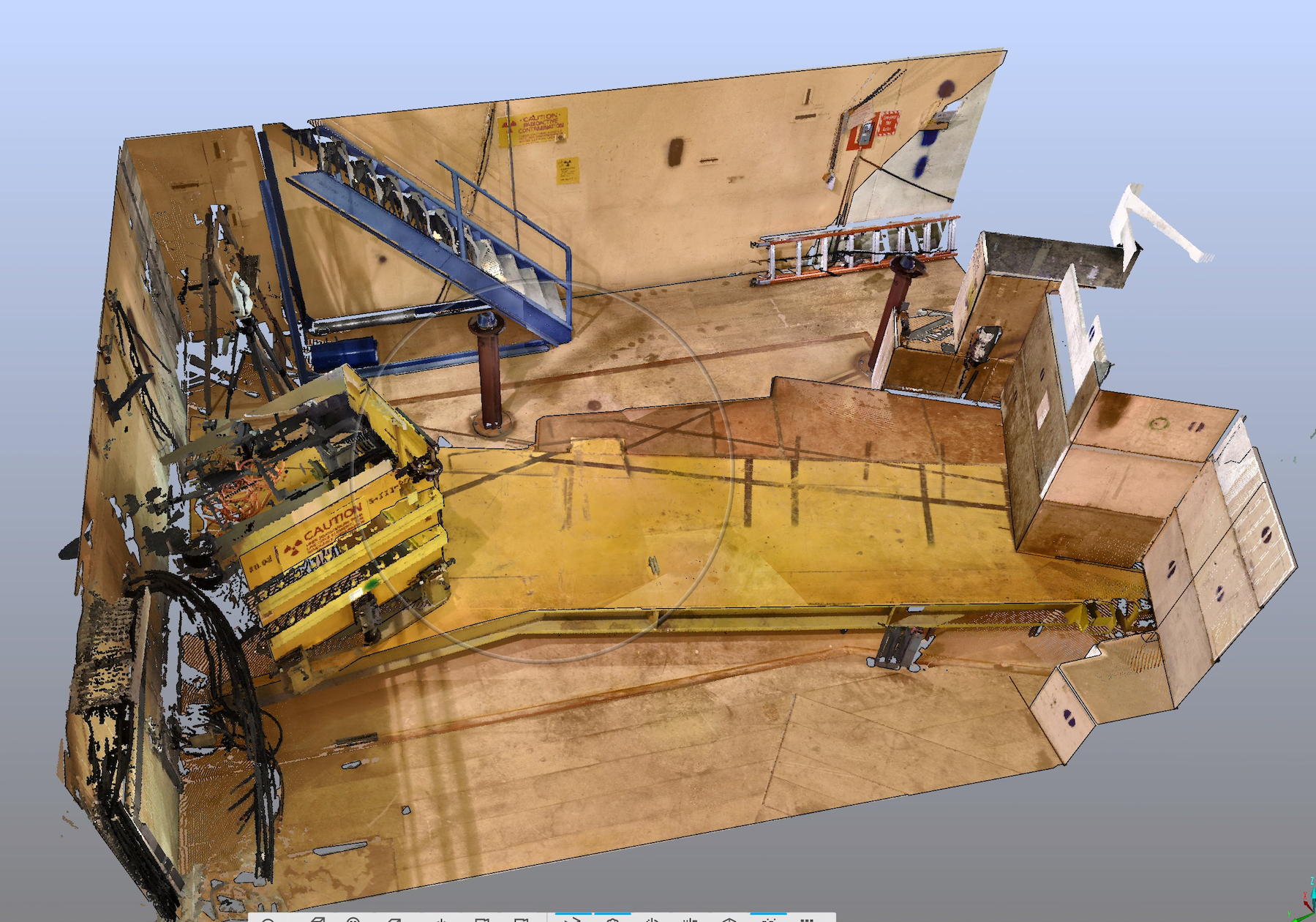
In addition to point clouds, TRIUMF’s FARO LiDAR camera also captures high-dynamic-range (HDR) panoramic photographs. After capturing several areas of the space, specialized CAD software is used to combine the point clouds and color information at close to perfect registration, re-constructing the complete facility in three dimensions. The scanner also captures equirectangular image data that supports full 360-degree views of these facilities as well.
The results of this work are then converted to a format that groups all spatial and color data (distances, incline, GPS, orientation, and light direction) and makes it accessible to other CAD platforms that have a range of editing capabilities.
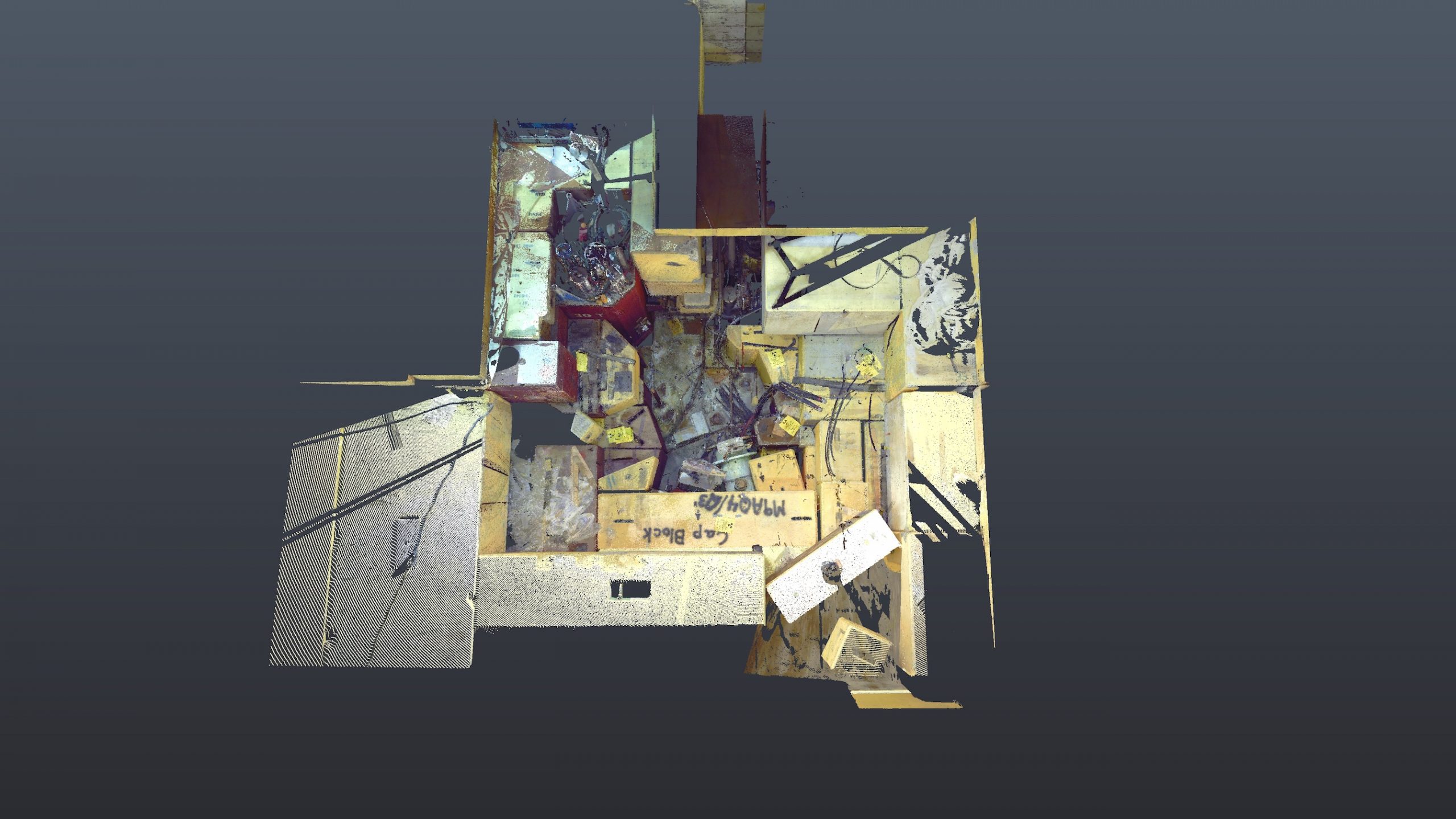
With the reconfigured data, we use the established pipeline of architecture and animation software to mimic live action footage from vantage points that could not otherwise be captured with a physical video camera. While higher resolutions give a sense of what it would be like to enter the space, the distances between points at lower resolutions enable audiences to see even deeper into the individual components that make up TRIUMF facilities.
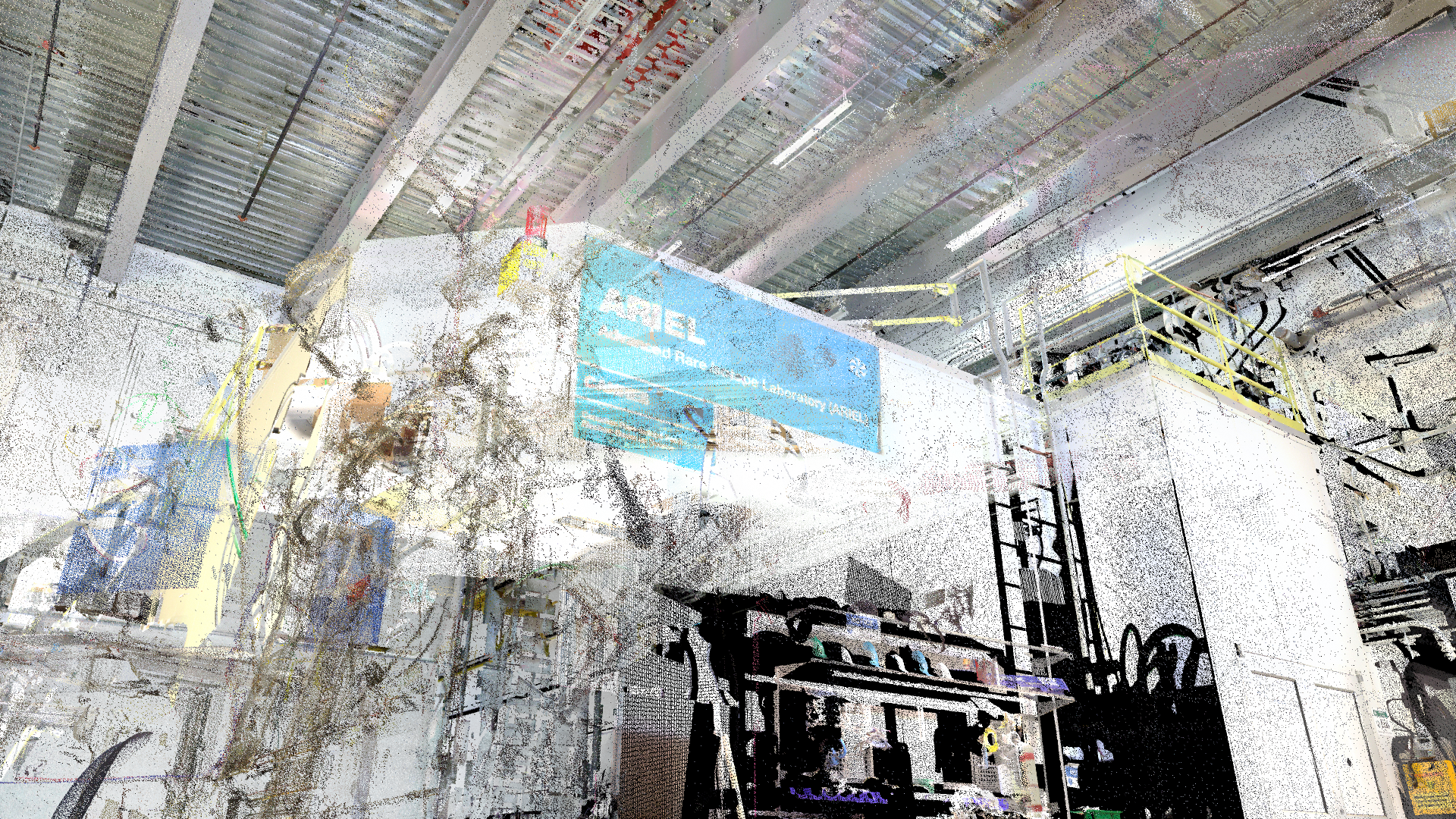
For an initial screen test of this production pipeline, LiDAR renders were combined with archival media to highlight the development of ARIEL from concept to commissioning.
LiDAR produced media combined with archival content shows the development of ARIEL from concept to commissioning
TRIUMF’s team of external collaborators include:
Scott Mallory, Production Lead & Digital Compositor
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}